
Для меня этот проект особенный. Даже как-то грустно, что работа над ним окончена. Думаю, эти чувства возникли из-за того, что в процессе работы я окунулась в своё детство. Вспомнила, как зимой мы ненадолго с родителями уезжали из городской суеты в маленькую деревушку, где жили родственники близких друзей, которые всегда с теплотой и радушием принимали нас у себя. В небольшом деревянном домике, с русской печкой мы гостили около недели.
Выйдя из дома можно было рассмотреть бескрайнее зимние поле, соседствующее с опушкой леса. Красота этой картины застыла в моей памяти.
Предлагаю Вашему вниманию проект “В зимнем лесу”, в ходе которого я расскажу о сервоприводе и его видах, как подключить один или несколько сервоприводов, а также как сделать крутящуюся платформу на основе этого устройства.
Немного полезной теории:
Современный человек не мыслит свою жизнь без автоматизации производственных процессов. Все больше работы выполняют роботы и манипуляторы, заменяя человека. Во всех этих механизмах широко применяют сервопривод.
Сервопривод — это механизм с электромотором, который может поворачиваться на заданный угол и удерживать текущее положение.

Наиболее популярны типы сервоприводов:
- Сервоприводы, которые удерживают заданный угол.
- Сервоприводы поддерживающие заданную скорость вращения.
Чаще всего в проектах по робототехнике встречается первый вид сервопривода, который удерживает заданный угол. С его помощью можно закрывать/открыть двери, приклеить стрелку на вал сервопривода и вращать барабан играя с другом в “Поле чудес” и даже сделать робота-паука Гексапод . Если Вы только начинаете изучать micro:bit, то советую обязательно приобрести несколько недорогих сервоприводов. Поверьте, экспериментировать с ними очень интересно!
Сегодня я расскажу о сервоприводе непрерывного вращения на 360 градусов, который и будет использоваться в проекте “ В зимнем лесу“.
Цель проекта: изготовить крутящуюся платформу, в виде стеклянного шара. Сделать шаблон платформы.
Оборудование:
- 1 x плата BBC micro:bit
- 1 x USB — микроUSB кабель
- 1 x плата расширения micro:bit
- 1 x макетная плата
- 1 х сервоприводе непрерывного вращения
- 1 х блок питания (для сервопривода) на 5V
- провода типа “папа-папа”, “папа-мама”
- В качестве света в доме используется светодиодная свеча
Основное отличие сервопривода постоянного вращения от сервопривода с ограниченным углом поворота в том, что он вращается бесконечно долго в том направлении, которое ему задано. Задавая промежуточные значения можно регулировать скорость вращения сервопривода в ту или другую сторону.
|
|
Полный ход в одном направлении, по часовой стрелке |
|
|
Полная остановка |
|
|
Полный ход в одном направлении, против часовой стрелки |



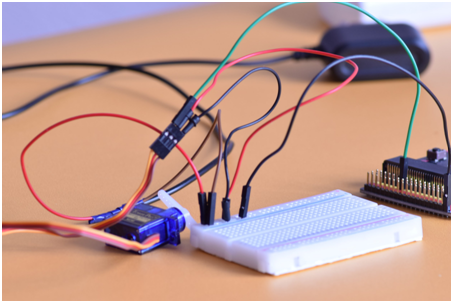
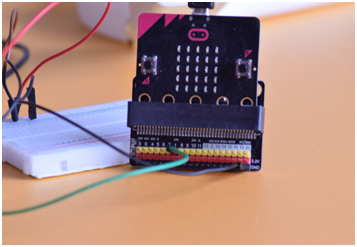
Подключение:
Не рекомендуется подключать сервоприводы напрямую к плате, т.к. они потребляют большой ток, что может вывести из строя micro:bit, а также вызвать постоянное “дерганье” сервопривода. Можно использовать аккумуляторную батарею для подачи питания непосредственно на сервопривод, а BBC micro:bit только для подачи управляющего сигнала.
Аккумуляторной батареи у меня не оказалось, зато я нашла старый блок питания на 5V, от кнопочного телефона. Удалила часть провода, соединила с перемычкой(не забывая о полярности) и вывела два провода(+/-) на макетную плату. Перед подключение, обязательно посмотрите видео.
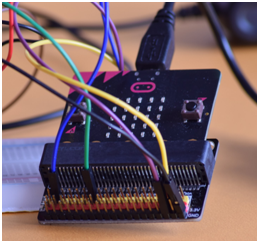
Плюсовая шина: +от блока питания(красный провод), питание от сервопривода(красный провод).
Минусовая шина: - от блока питания(коричневый провод), GND от сервопривода коричневый провод. Объединим земли двух контуров, черный провод соединить с GND на плате расширения micro:bit.
Оранжевый провод сервопривода(Signal) соединяем с P1.
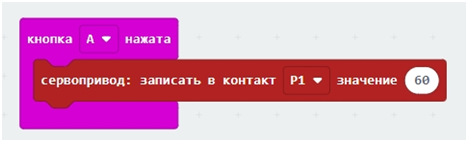
Режимы управления:
- Сервопривод вращается со скорость 60:
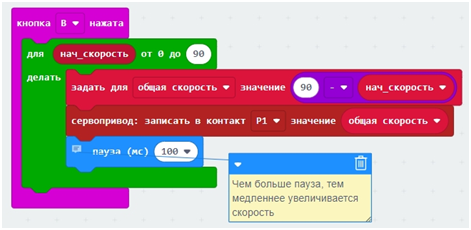
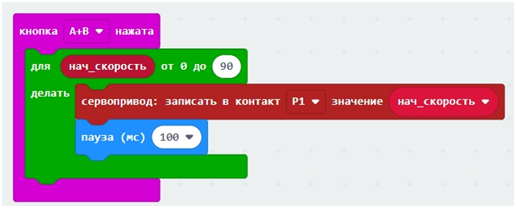
- Скорость постепенно увеличивается:
3. Скорость постепенно уменьшается:
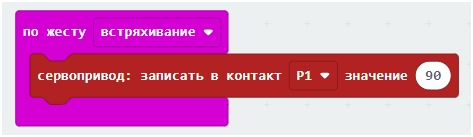
4. Полная остановка сервопривода:
Код программы: https://makecode.microbit.org/_WzUdzAA927RT
Управляем сервоприводом непрерывного вращения, с помощью переменного резистора.
Цель: управлять сервоприводом, с помощью потенциометра. Изменять скорость и направление вращения.
Переменный резистор (потенциометр) дает возможность плавно регулировать сопротивление поворотом ручки, изменяя его от 0 до какого-то максимального значения (указано на корпусе устройства).
Подключение:
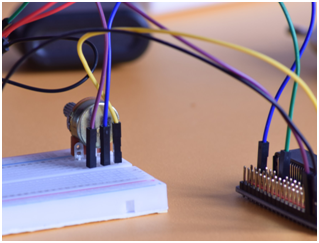
Добавим к предыдущей схеме потенциометр.
(1)Левая ножка - 3,3 V
(2)Средняя ножка - Р0
(3)Правая ножка - GND
Не важно, какая из крайних ножек потенциометра будет подключена к 3,3 V, а какая к GND, меняется только направление, в котором нужно крутить ручку для увеличения напряжения. Сигнал считываем со средней ножки.
Напомню, что для того, чтобы проследить какие данные поступают из переменного резистора, можно использовать такой код:
Слева выберите Show console Device:

Плавно вращайте ручку потенциометра и проследите за изменением данных. После теста, код нужно удалить.
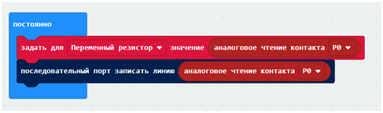
Перейдем к написанию программы. Сопоставим значения, которые мы получаем из потенциометра от 0 до 1023, к значениям для сервопривода от 0 до 180. Для этого создайте переменную “Переменный_резистор”, а затем используйте функцию map, из раздела Контакты:

Теперь осталось только “передать” полученные данные сервоприводу, добавив такую команду:

Важно: вращать ручку потенциометра очень плавно! Теперь можно регулировать скорость и направление вращения.
Код программы: https://makecode.microbit.org/_8Xe12VWCa51R
Шаблон крутящейся платформы.
Вы можете изготовить свою крутящуюся платформу, воспользовавшись моим шаблоном. Его можно скачать на этой страничке, в прикрепленных файлах. В файле дана инструкция, как рассчитать размеры боковой детали для платформы любого диаметра. В примере использована окружность диаметром 8 см. В видео Вы найдете подробную инструкцию по сборке.
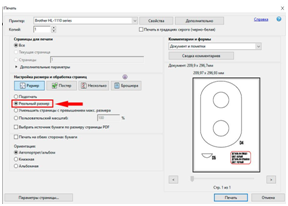
Важно: перед распечаткой pdf-файлов убедитесь, что в настройках выбрана опция “Реальный размер”.
Желаю, чтобы в Вашей жизни было такое место, где Вас всегда любят и ждут!)


