Признаюсь как на духу, у меня есть мечта. У каждой мечты есть имя. Познакомьтесь, мою мечту зовут одноногий монопрыг.
Руководитель кружка, если кружок организован в клубном формате, такой же кружковец, как и все остальные. Ну, может только прав и обязанностей у него несколько побольше. Но мечтать, несмотря на это, он может на общих основаниях.
Так вот. Выглядеть одноногий монопрыг моей мечты должен примерно так, как Пугало-Репка из «Ходячего замка» Хаяо Миядзаки.
Мне могут возразить, что моя мечта давно уже воплощена в конструкции, созданной одним из отцов-основателей знаменитой Boston Dynamics Марком Рэйбертом, и описанной им в книге «Legged Robots that Balance» еще в далеком 1986 году. Зачем мечтать о том, что уже кем-то реализовано?
Согласен, технически задача решена, но я хочу получить аналогичный результат для курса образовательной робототехники, коротким проектом (одно занятие – один проект), из подручных материалов, используя самые простые и доступные технологии и приемы. Таких решений задачи удержания динамического равновесия устройством с одной подвижной точкой опоры мне в Сети, во всяком случае пока, не встречалось.
Не решена до сих пор эта задача и в нашем кружке. Хотя некоторые аналоги монопрыга постоянно дразнятся самим фактом своего существования, бегают и даже прыгают на одной ножке перед глазами. Тем не менее, подходы к снаряду периодически предпринимаются.
Самый простой из них – балансирующие фигурки. Классика по мотивам динамической игрушки Парящий Орел.

Существует огромное количество вариаций на эту тему маятника с верхним подвесом: бабочки, стрекозы, летучие мыши, попугаи, туканы, танцовщицы и многое, многое другое. Все они, как правило, изготавливаются из плотной бумаги или картона. Этот материал не всегда обладает нужной жесткостью и малой плотностью, необходимой для таких поделок. Поэтому хочу обратить внимание на этого Циркового Акробата.

Он изготовлен из плотного и жесткого, но очень легкого экструдированного пенопласта, который используется в качестве декоративной плитки для облицовки потолков, так называемой потолочки. Очень полезный в нашем деле материал.
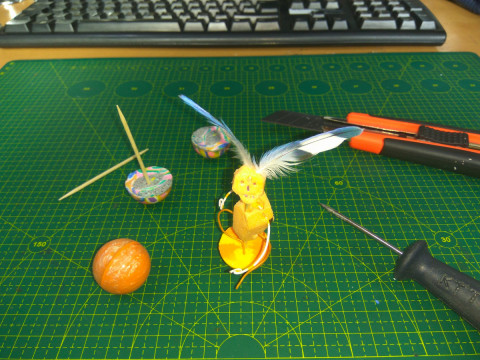
Другой класс динамических игрушек-эквилибристов: Ваньки-встаньки и их многочисленные клоны. В основу этого Настоящего Индейца, например, положена половинка резинового мячика-попрыгунчика. Перья для головного убора индейцу любезно одолжил попугай одного из наших кружковцев.
Постепенно мы подобрались к следующему очень интересному классу умеющих держать баланс устройств: волчки-гироскопы. Так сложилось, что я достаточно долгое время лоббировал эту динамическую игрушку в нашем кружке. Поделка, что называется, не шла. Прорыв случился на занятиях с конструктором Лего. Разнообразнейшие волчки начали плодиться со страшной силой и захватывать окружающее пространство, устраивая между собой эпические сражения. Тогда я подумал, что настало подходящее время перейти к электромеханическому гироботу.
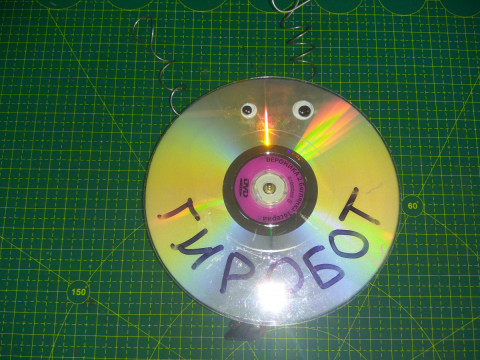
Поскольку прочность конструкции тут уже имеет не последнее значение, изготовление гиробота решил вести в рамках «горячего» технологического курса, т.е. с использованием термоклеевого пистолета и паяльника.


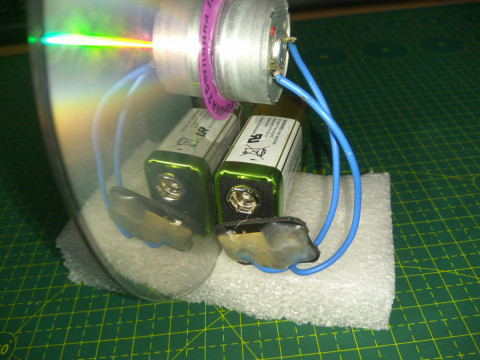
Моторчик использовал от привода лотка старого компьютерного сидирома. Корпусом послужил компакт диск. На ось электромотора была подобрана пластиковая червячная шестерня с тугой посадкой. Червяк в свою очередь был вклеен термоклеем по центру (это важно!) большой металлической шайбы, купленной в отделе скобяных изделий Леруа Мерлен. Тут есть одна технологическая тонкость. Чтобы клей хорошо склеился с массивной металлической деталью, деталь надо предварительно нагреть. Я для этой цели воспользовался феном для волос.
Батарейку использовал девятивольтовую «Крону». Она была присоединена к корпусу приемом из «холодного» технологического курса – при помощи двухстороннего скотча на вспененной основе. Колодочку для подключения батарейки к мотору взял от такой же, но уже разряженной батарейки «Крона», она легко разбирается при помощи кусачек. Чтобы провода легко припаялись к железным выводам, я их предварительно залудил при помощи специального флюса «ТТ». Он не относится к классу активных кислотных флюсов, поэтому для наших электротехнических целей подходит оптимально. Провода в местах пайки дополнительно зафиксировал каплями термоклея.

Колодочка, подключенная к одному выводу батарейки, является и импровизированным поворотным выключателем. Легкий поворот, контакты замыкаются, и гиробот приводится в рабочее состояние – гироскоп начинает раскручиваться.
На видео хорошо видно, что гиробот не только держит равновесие, но и движется!
Пускаем его в свободное путешествие по полу.
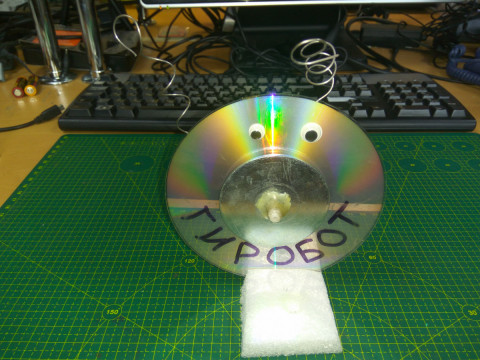
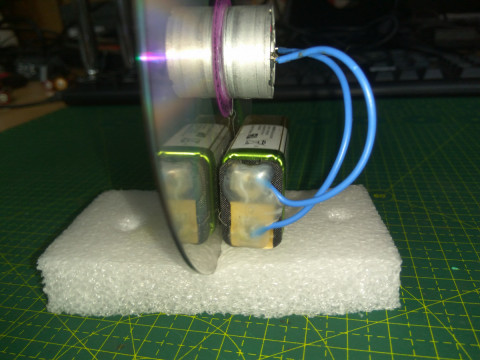
Обратите внимание, что гиробот явился гибридом трех своих знатных предков: виброхода, балансирущего ваньки-встаньки и волчка-гироскопа. Первое родство легко проверить, зафиксировав его при помощи подставки.
Как видите, вибрация, от которой в наших условиях практически невозможно избавиться из-за неточности балансировки маховика гироскопа, т.е. получающаяся сама собой, оказалась очень полезным качеством.
И хотя одноногий монопрыг так и остается для меня до сих пор недостижимой высокой мечтой, какие все же интересные пейзажи открываются по дороге к нему.

Другие публикации автора:




