
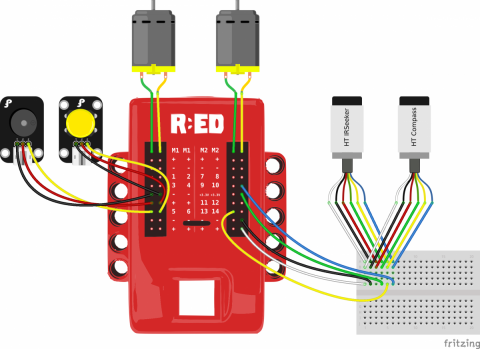
Схема робота-футболиста собрана на контроллере RED ONE. Внутри этого контроллера Arduino Nano с распаянными драйверами для DC-моторов. Для паузы/старта робота во время матча и подачи звуковых сигналов в определенные моменты игры использовал из набора RED кнопку (Button) и пьезпищалку (Buzzer), еще для ориентации по сторонам света, чтобы робот имел возможность искать ворота соперника, подключил по шине i2c датчик для LEGO NXT HT Compass и для поиска инфракрасного мяча подключил NXT HT IRSeeker V2.
Важно! Оказалось, что для нормальной работы датчика инфракрасного поиска NXT HT IRSeeker V2 обязательно нужно подключить питание +5 Вольт к белому проводу, иначе ему не достаточно питания 3,3 Вольта. При этом NXT HT Compass отлично работает от 3,3 Вольт.
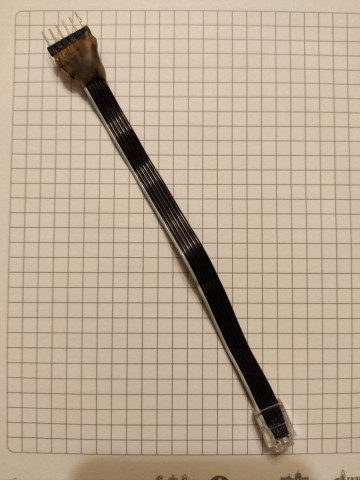
Для подключения датчиков с 6-ти контактными разъемами для LEGO NXT пришлось сделать самодельные кабели. Шестижильный кабель отлично подошел от шлейфа IDE, которым в старом персональном компьютере когда-то подключались жесткие диски и CD-ROMы. С одной стороны кабеля разъем RJ12/RJ25 (6P6C) с отрезанной защелкой, т.к. у LEGO защелка смещена в сторону, поэтому проще ее совсем удалить. С другой стороны кабеля припаял 6-контактную PLS с шагом 2,45 мм, чтобы подходила к макетной беспаячной плате.
Подключение HiTechnic IRSeeker и HiTechnic Compass к Arduino
Подключение к разъему NXT -> Arduino NANO описано оригинальными цветами стандартного кабеля LEGO:
white -> battery Vin (ВАЖНО! иначе питания не достаточно для нормальной работы)
black -> (GND)
red -> battery – (GND)
green -> Arduino +3.3V
yellow -> Arduino SCL (A5)
blue -> Arduino SDA (A4)
Распиновку контроллера RED ONE нашел в описании на сайте https://r-ed.world/ . Из описания узнал к каким выводам контроллера RED ONE подключены ардуиновские выводы для шины i2c: SCL A5 и SDA A4.
Подключение к контроллеру RED ONE видно на схеме выше:
white -> + (+5 Вольт)
black -> - (GND)
red ->
green -> +3.3V
yellow -> 13 (SCL A5)
blue -> 10 (SDA A4)
Фото робота опубликовано в посте https://novator.team/post/1686