
Напоминаю, что 18-19 марта состоятся игры роботов-футболистов на робототехническом фестивале «РОБОФЕСТ» и что подача заявки на участие до 20.02.
Более подробнее я писал об этом в предыдущем посте
Вообщем, пора собирать роботов. И я хочу вкратце описать из чего можно собрать своих роботов.
Начнем с шасси.
Прежде чем выбрать материал для изготовления шасси, нужно понимать, что роботы процессе игры будут сталкиваться с другими робота в борьбе за мяч, врезаться в ворота и борта игрового поля. Наиболее доступный материал для изготовления шасси фанера (от 3 мм) чуть по дороже и посложнее в обработке это пластик (от 4 мм) можно также использовать детали конструктора например структор
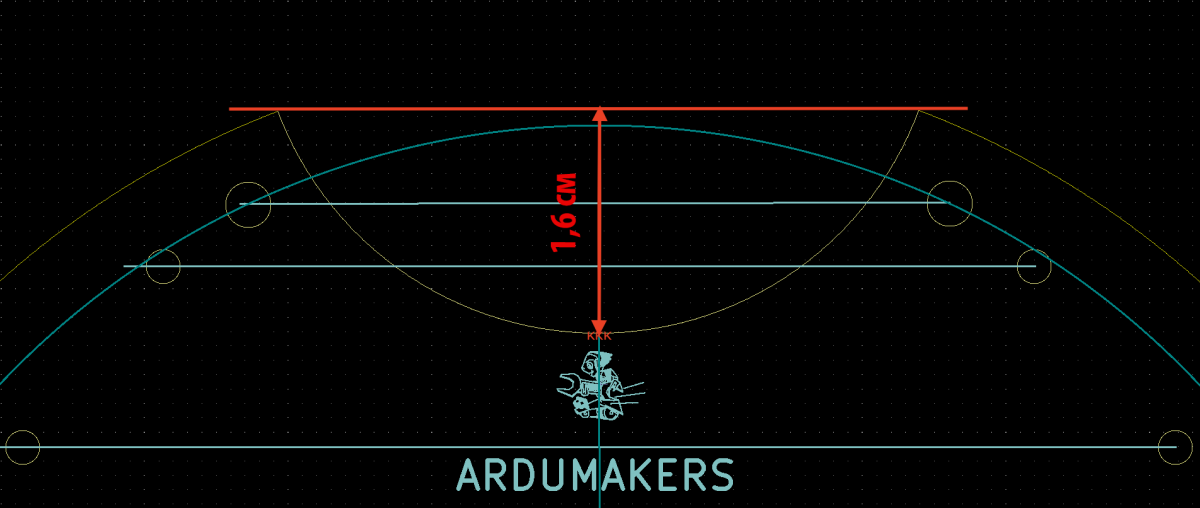
Прежде чем делать нишу для захвата мяча, обратите внимание, как будет производится замер зоны захвата и что означает «Зона захвата мяча должна быть не более 1,6 см»
Переходим к основным компонентам.
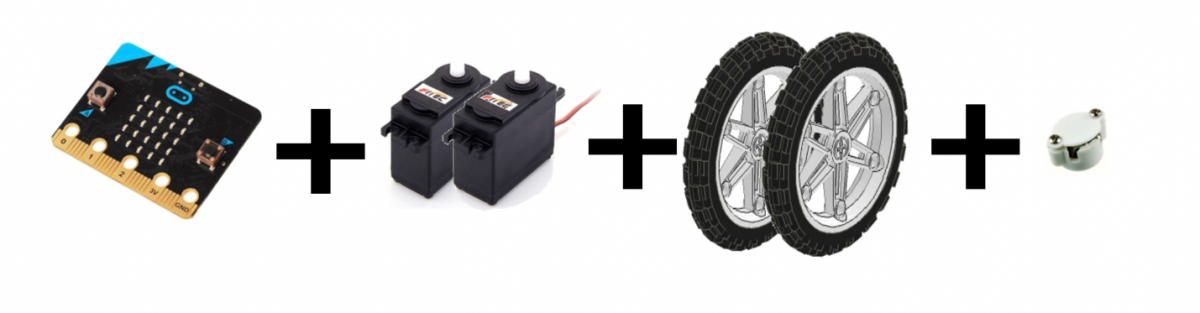
Самая простая и самая бюджетная конструкция может быть построена с использованием одной платы micro:bit и двух сервомоторов с возможностью вращения на 360° в данном случае очень легко сделать самодельные колеса (для этого практически все есть в комплекте сервомоторов) либо приладить колеса от Lego. И плюс к этому шаровая опора. Дополнительных плат не требуется, останется делать пару переходных шлейфиков и рабочая схема готова...
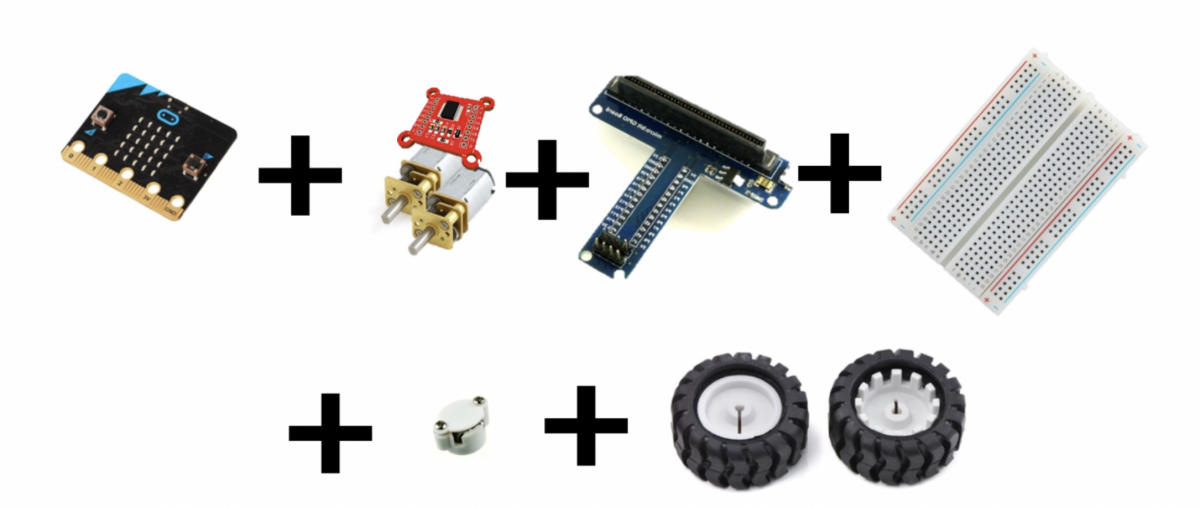
Следующая конструкция получится немного посложнее, потому и компонентов будет больше. Конечно же одна плата micro:bit, два мотора, драйвер двигателей, модуль коммутации для micro:bit, макетная плата (400 контактов… чтобы точно попасть в габариты, с платы можно снять линии питания с обоих сторон), шаровая опора и колеса
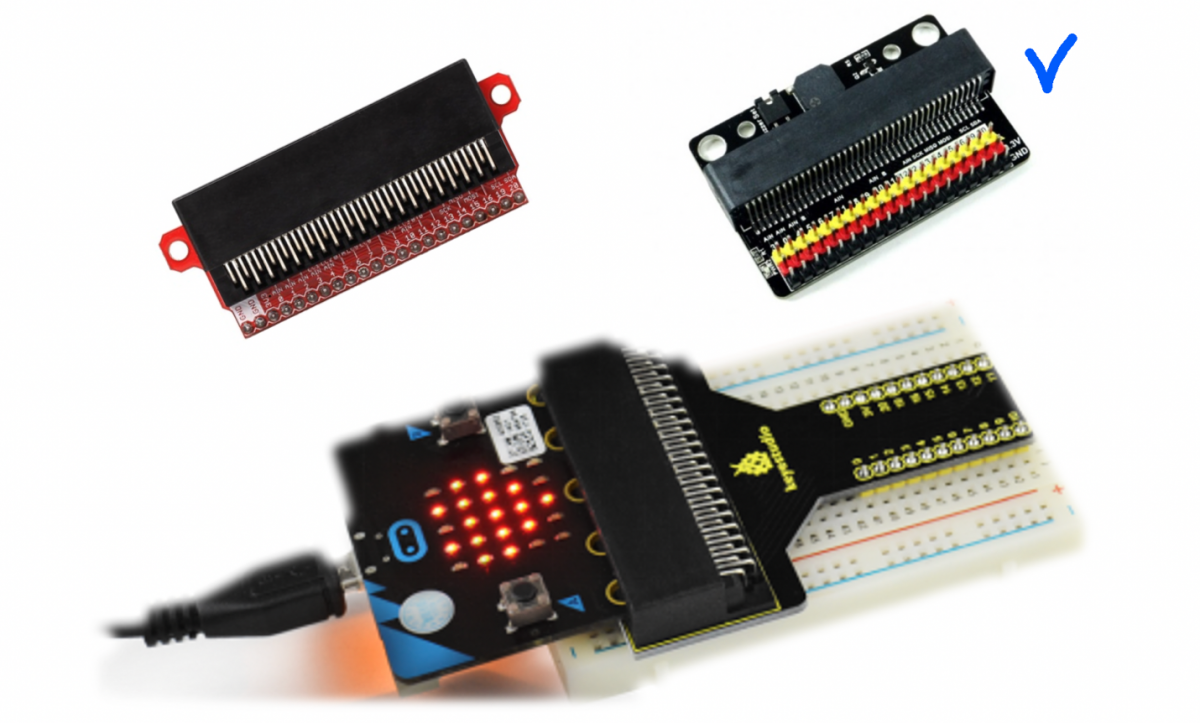
Модули коммутации могут быть любые, главное их располагать так на макетной плате чтобы вписаться в габарит робота 130 мм ( на рисунке ниже изображено наиболее удачное расположение), а некоторые из них можно использовать без макетной платы (помеченное галкой изображение)
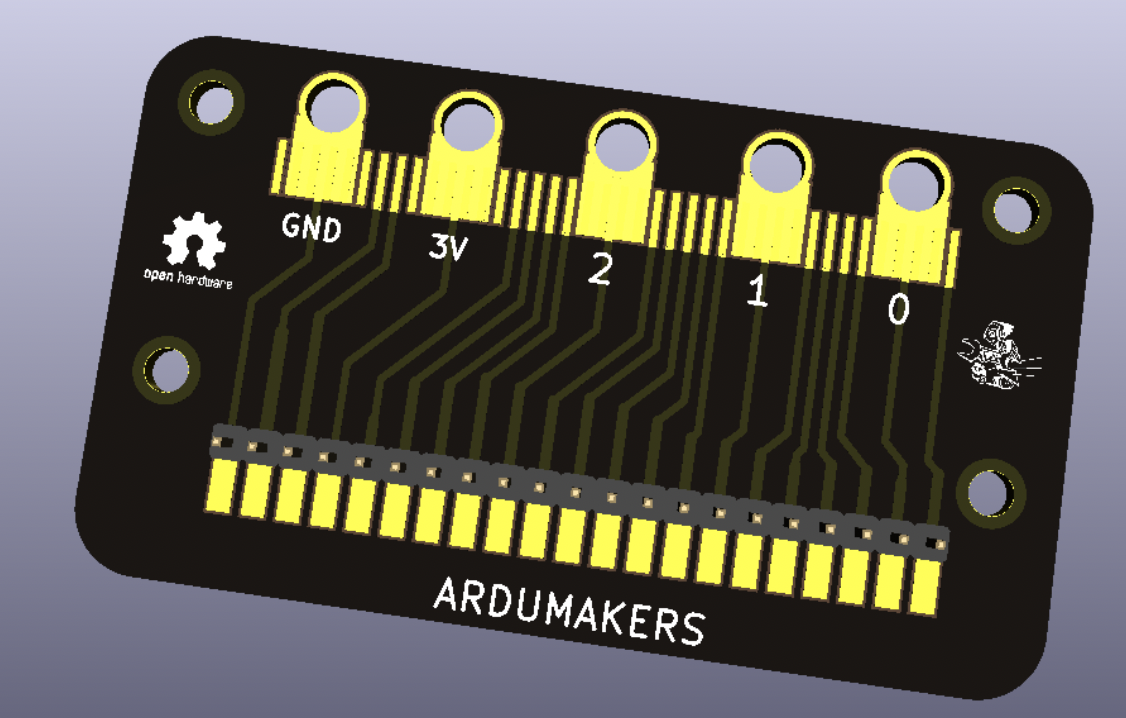
Для тех, у кого нет возможности приобрести подобные платы, участники проекта ARDUMAKERS разработали пару плат, для тех кто дружит с паяльником и знает что такое метод ЛУТ (Ссылки на файлы) Их можно использовать как есть или вначале добавить что-то свое.
Первая плата – изготовив которую, можно обойтись без макетки.
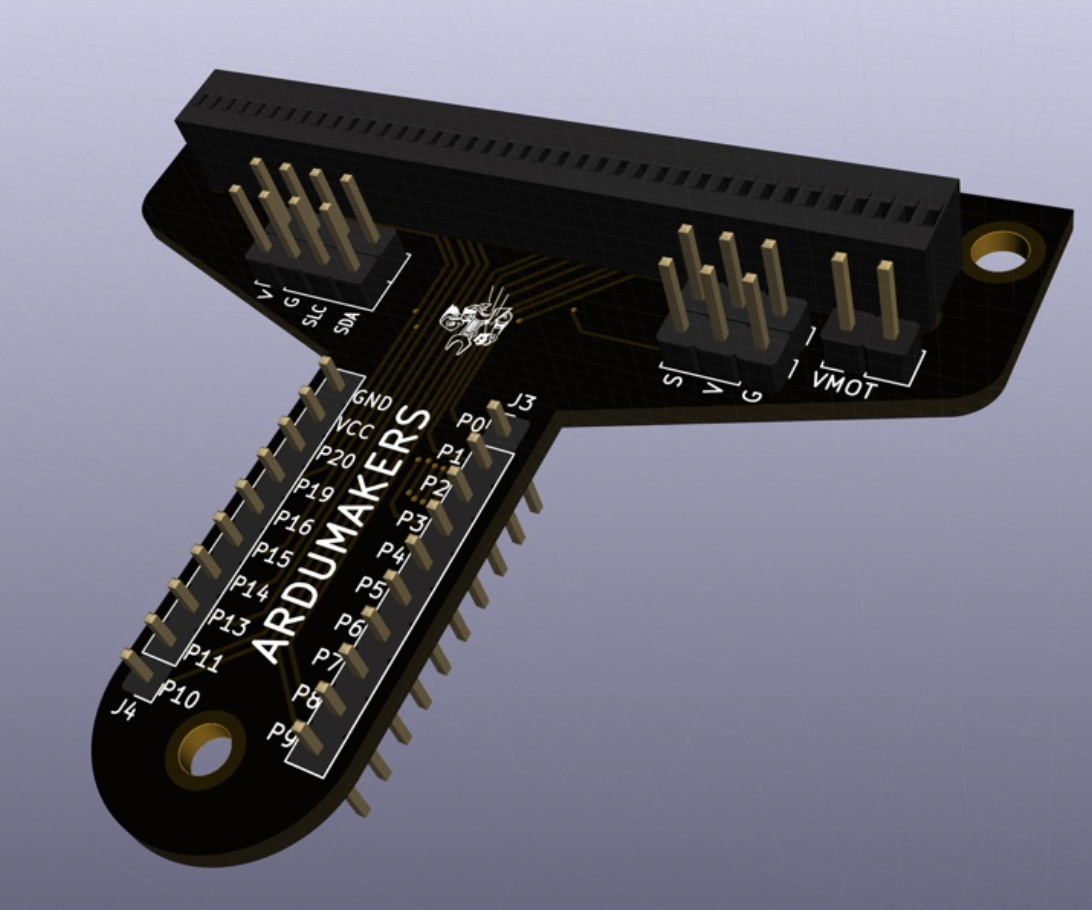
Вторая плата – больше похожа на модули коммутации, представленные выше. Изготовление самой платы лучше заказать на производстве (например Резонит, gerber_файлы прилагаются для производства нужен ZIP-архив), а распаять можно будет самим. Если штыревые разъемы распаять контактами вверх, то плату тоже можно будет использовать без макетки.
Питание во всех выше описанных случаях может быть двух видов:
Раздельное – отдельно 3V для micro:bit и отдельно питание (от 6V) для моторов или сервомоторов (но это увеличивает вес...)
Общее (от 6V) для моторов и платы micro:bit, но в этом случае вам нужно обязательно понизить напряжение для питания micro:bit, используя DC-DC преобразователь на 3,3 V
И еще один вариант комплектации, возможно он более дорогой, но имеет свои преимущества (простота сборки в том числе) - это: одна плата micro:bit, два мотора, Motor Driver Board для micro:bit, шаровая опора и колеса
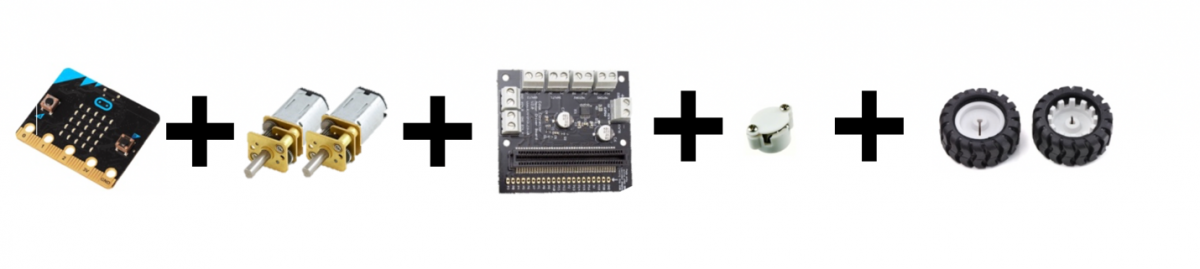
в данном варианте вам нужно только подключить моторы к Motor Driver Board, вствить в разъем micro:bit, и подключить питание и рабочая схема готова.
Это конечно не все возможные варианты, лишь самые простые в исполнении, но возможно эта статья позволит кому-то решиться на участие в соревнованиях...



